Summary
One of the most critical services in emergencies are the location and guidance services: accessing realtime information on what is happening and deciding how to proceed with the evacuation is of vital importance. This project will focus on indoors and large spaces (i.e., hospitals, universities, shopping centers, educational centers, galleries, tunnels, etc.).
GUIDE2FR will provide support to Security, Prevention, Rescue, and Evacuation Services Indoors. This project will be based on Robot Swarm and Internet of Things (IoT) technologies capable of operating indoors with hostile conditions associated with an emergency. The robot swarm will be able to navigate autonomously and collect relevant information of the intervention (before and during it) in a distributed format from the environment, wearable devices of persons to be rescued, and wearable textile systems of rescue workers and firefighters. State of the art in emergency response mechanisms lags well behind the technological and scientific progress in manufacturing navigation devices, making decisions, and big data processes. We will introduce scientific contributions in mechanical and electronic modeling, acquisition and location modeling with BIM (Building Information Modeling), navigation modeling, and computational design. GUIDE2FR will facilitate autonomous monitoring and decision-making in realtime to avoid risks in emergency situations.
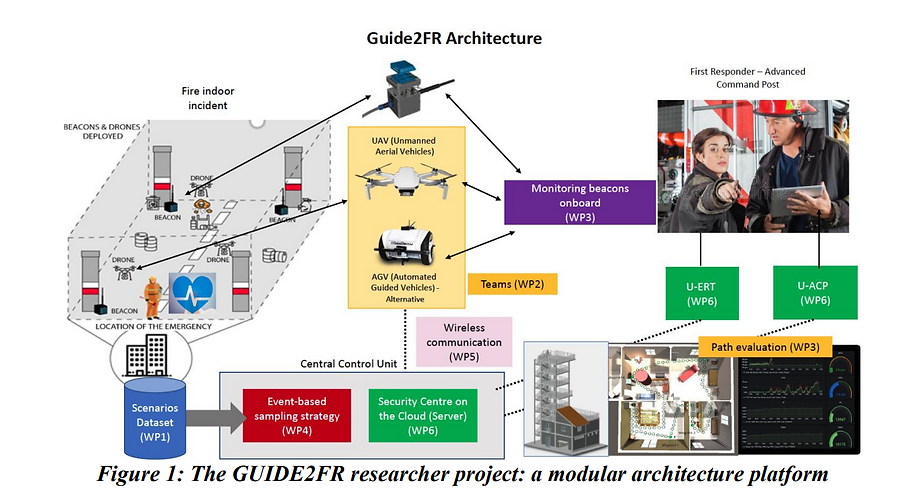
Due to the lack of current supervision platforms in real-time for inside building in hostile environments, the GUIDE2FR is proposed as a tool to solve the current shortcomings of the Emergency Response Teams (ERTs), simplifying the interaction with the Advanced Command Post (ACP), while providing information about the intervention based on the work of Robot Swarm (Unmanned Aerial Vehicles, UAVs). We will design new UAVs to work in teams with Automated Guided Vehicles (AGVs) to collect data before, after, and during interventions with collaboration with Internet of Things (IoT) devices and wearables. In addition, they will also be able to dynamically spread out beacons in the places where the emergency occurs -where there may or may not be a prior sensing infrastructure-. The Robot swarm will operate to collect information during the intervention(environmental, physiological, routes taken, results, etc.). Furthermore, real-time decision-making is very important to avoid human failures to reduce the number of accidents and risks. The system will learn and make decisions -change the intervention route or change evacuation priorities- due to changes in the environment and other relevant data.
The GUIDE2FR design methodology will stand on our scientific pillars that will drive the scientific innovation within the project: (1) Mechanical and electronics for industrial design, (2) Acquisition and location modeling based on BIM; (3) Navigation modeling; and (4) Computational design. The proposal is largely motivated by successful results from recent group projects and collaborations with professionals of the Federation of the European Union Fire Officer Associations and national/international companies